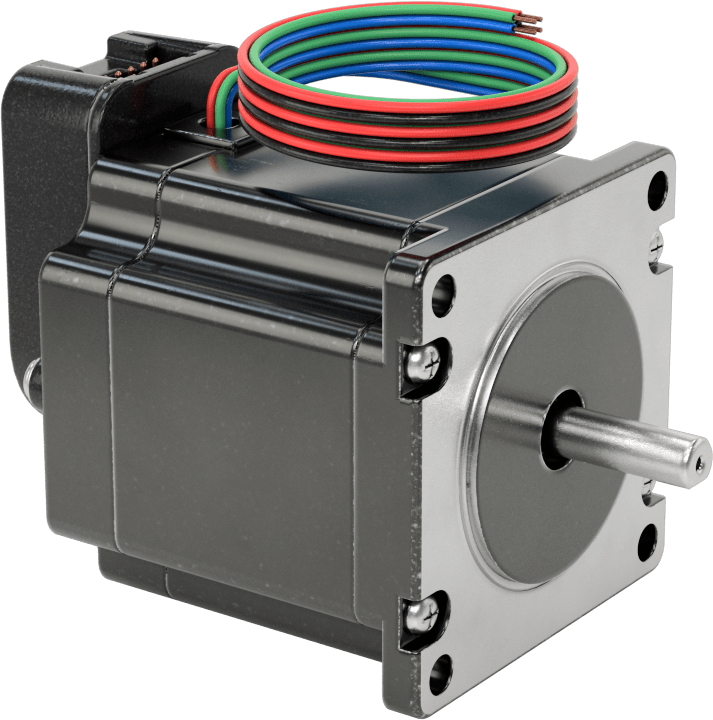
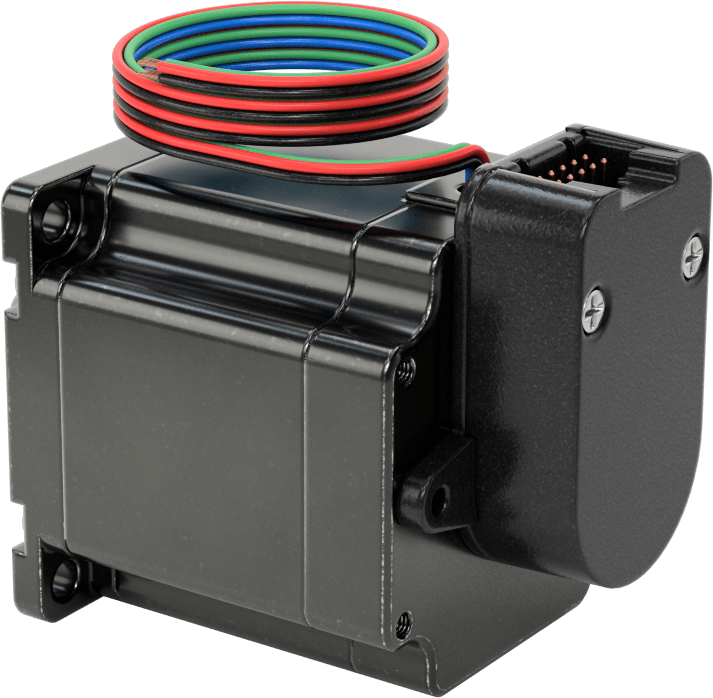
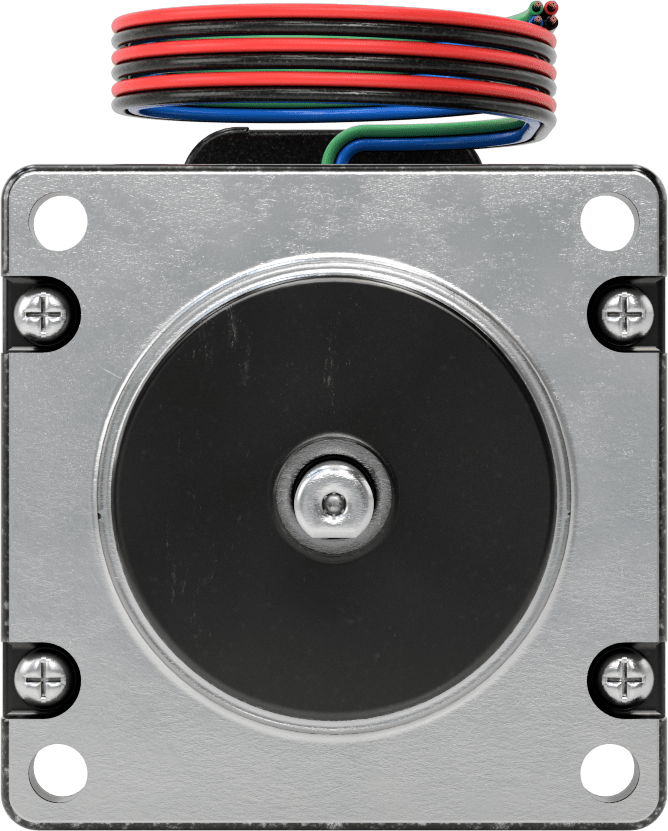
Step Motor, Enkoderli, NEMA 23
5 varyant (Maksimum Tutma Torku, Maksimum Dönüş Hızı); ₺52.220 – ₺75.264
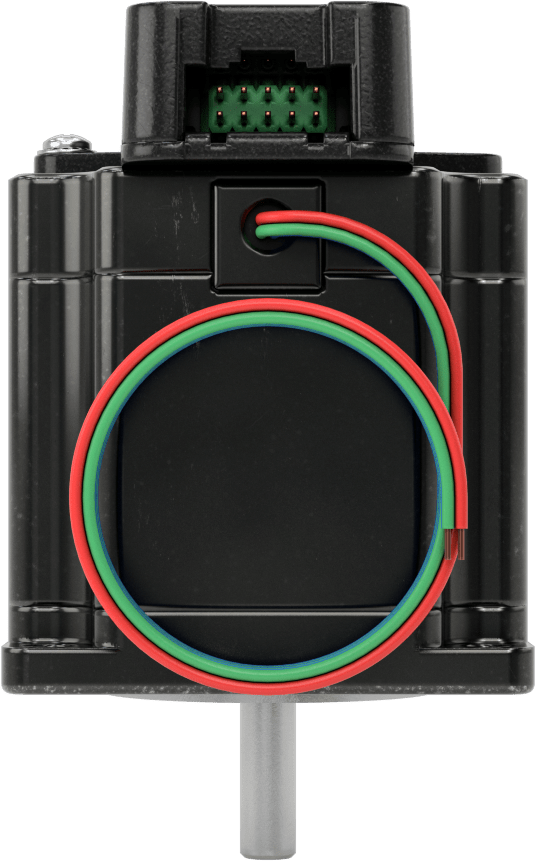
Step Motor, Enkoderli, NEMA 23, milin gerçek zamanlı hızını ve konumunu izleyerek konumlandırma hassasiyetini artırır. Bu ailede 5 varyant bulunur; Maksimum Tutma Torku seçenekleri 181 in·ozf ile 600,4 in·ozf arasında değişir. Fiyat, seçilen kombinasyona göre ₺52.220 – ₺75.264 aralığında değişir.

Özellikler
| Bileşen | Motor/Enkoderler |
| Gövde Şekli | Kare |
| Motor Gövdesi Boyutu | NEMA 23 |
| Maksimum Tutma Torku | 181 in·ozf |
| Maksimum Dönüş Hızı | 600 rpm |
| Faz Başına Maksimum Akım | 2.8 amp |
| Gerilim | 5V DC |
| Tam Adım Artışı | 1.8° |
| Step Motor Kutupları | Bipolar |
| Enkoder Konumlandırma Türü | Artımlı |
| Devir Başına Sayım Sayısı | 1,000 |
| Tel Çıkış Sayısı | 4 |
| Toplam | |
| Uzunluk | 3.7"94.0 mm |
| Genişlik | 2.6"66.0 mm |
| Yükseklik | 2.3"58.4 mm |
| Mil | |
| Çap | 1/4"6.35 mm |
| Uzunluk | 3/4"19.0 mm |
| Merkezden Taban'a Uzunluk | 1.13"28.7 mm |
| Tip | D Profili |
| Mil Sayısı | 2 |
| Sıcaklık Aralığı | |
| Minimum | -18°C |
| Maksimum | 49°C |
| Rulman Tipi | Bilye |
| Çalışma Yönü | Saat Yönünde, Saat Yönünün Tersine |
| Çalışma Döngüsü | Sürekli |
| Elektrik Bağlantısı Tipi | Sabit Kablolama |
| Elektrik Fazı | İki |
| Muhafaza Malzemesi | Alüminyum, Çelik |
| Yüz Şekli | Kare |
| Faz başına endüktans | Derecelendirilmemiştir |
| Yalıtım | |
| Sınıf | B |
| Maksimum Sıcaklık | 130°C |
| Motor Tipi | Hibrit Step Motoru |
| Montaj Konumu | Yüzey |
| Montaj Konumu | Herhangi Bir Açı, Yatay, Dikey |
| Güç Kaynağı | Elektrik |
| Radyal Yük Kapasitesi | 15 lb.6.80 kg |
| Faz Başına Direnç | 0.8 ohm |
| Rotor Ataleti | 1.5 oz·in² |
| Eksenel Yük Kapasitesi | 13 lbf |
| Ağırlık | 1.5 lb.0.68 kg |
| Tel Bağlantısı | Tel Uçları |
| Tel Ucu Rengi | Siyah, Mavi, Yeşil, Kırmızı |
| Kablo Ucu Kalınlığı (AWG) | 22 |
| Tel Ucu Uzunluğu | 24"60.96 cm |
| Menşe Ülke | Amerika Birleşik Devletleri |
Açıklama
Konumlandırma hassasiyetini artırmak için, bu step motorlarda milin gerçek zamanlı hızını ve konumunu izleyen dahili bir enkoder bulunur. Bu enkoder, verileri bir kontrol ünitesine (dahil değildir) gönderir; kontrol ünitesi ise mil doğru konumda değilse onu ayarlar veya durdurur. Bu, iki motor arasındaki hareketi koordine ederken olduğu gibi, göreceli konumlandırmanın kritik olduğu durumlarda motorları kullanışlı hale getirir. Step motorlar, hassas ve tekrarlayan hareketler için idealdir. Saatin akrep ve yelkovanına benzer şekilde, şaftları düzgün bir hareket sağlamak için küçük ve eşit aralıklarla döner. Şaft durduğunda, yüke karşı bir kuvvet uygulansa bile konumunu korur. Hepsi bipolar hibrit step motorlardır, bu nedenle akım her iki yönde de akabilir. Bu, tek kutuplu step motorlara göre daha yüksek tork, hassasiyet ve verimlilik sağlamalarına yardımcı olur.
Tüm motorlar için bir kontrolör ve sürücü gereklidir (dahil değildir).
2 Mil—Çok eksenli bir sistemde hareketin koordine edilmesi gibi göreceli konumlandırmanın kritik olduğu durumlarda, iki milli bir motor seçin ve bunlardan birine bir enkoder (dahil değildir) monte edin. Enkoder, milin konumunu izler ve kontrolöre geri bildirir.
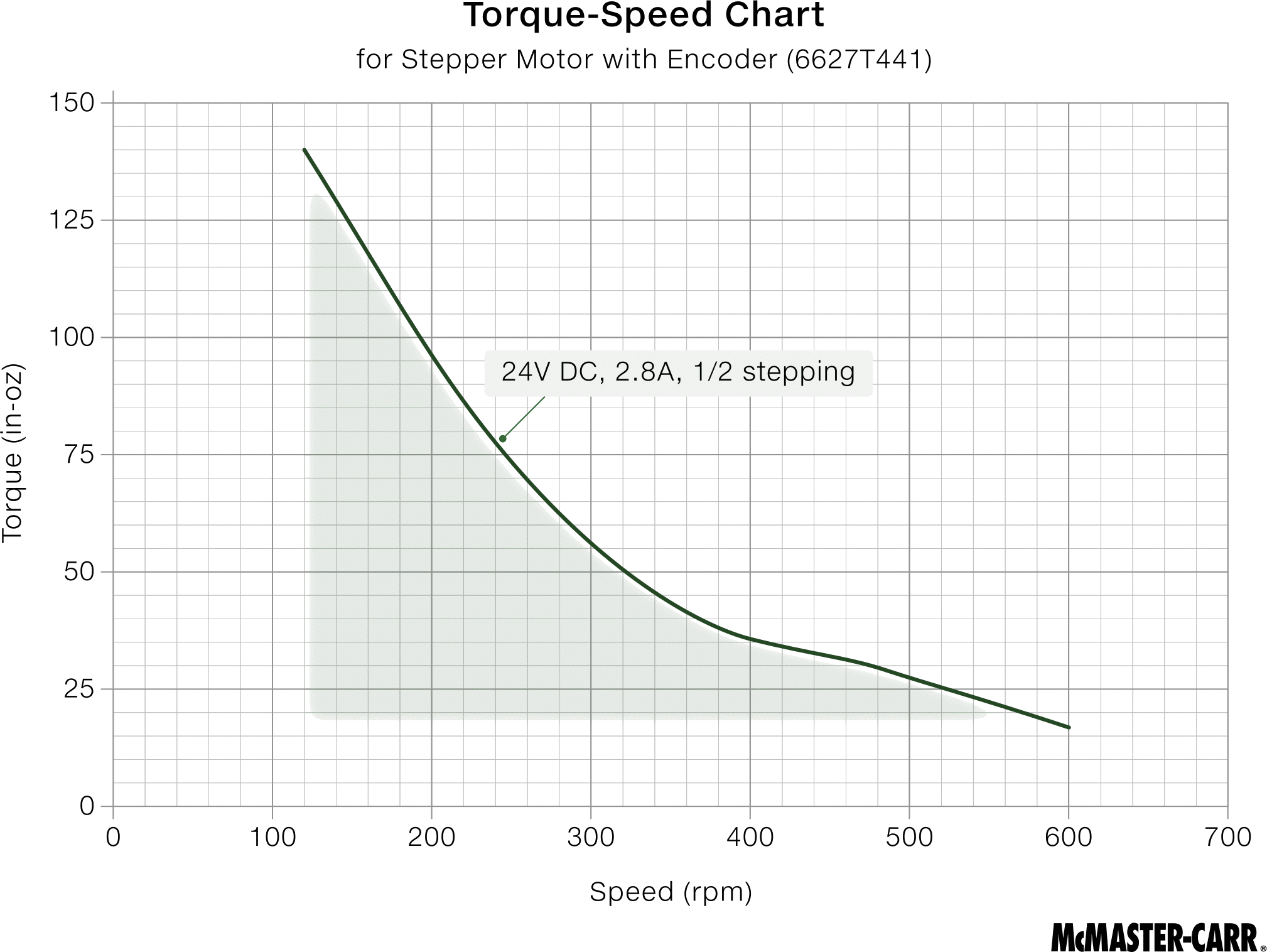
Maksimum Tutma Torku — Tutma torku, mil sabit durumdayken onu konumundan çıkarmak için gereken kuvvettir. Mil hareket halindeyken, tork genellikle hız arttıkça azalır. Uygulamanız için hangi motorun uygun olacağını doğrulamak için bir tork-hız eğrisini kullanın. Bir motorun eğrisini görüntülemek için parça numarasına tıklayın ve “Ürün Detayı”nı seçin.
Tam Adım Artışı — Tam adım artışı, şaftın bir konumdan bir sonraki konuma dönmesidir. Daha küçük bir tam adım artışı, rotorun daha fazla dişe sahip olduğu anlamına gelir ve bu da daha yumuşak ve daha hassas bir hareket sağlar. 1.8° standart olarak kabul edilir.